中文(中国)
中文(中国)
- English
- 中文(中国)
- Русский
- 한국어
- עִבְרִית
中文(中国)


::产品概述::
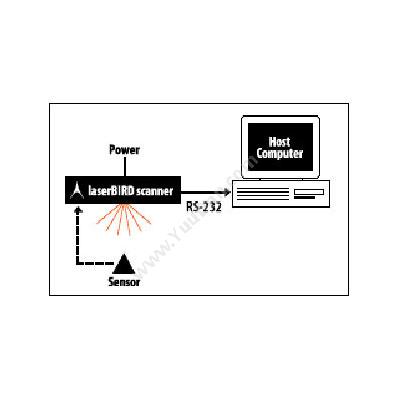
在大多数跟踪环境中需要有精确的光学跟踪仪,它可应用于模拟器,医疗及三维可视中的头部和目标跟踪。LaserBTRD连续的对工作空间进行扫描,使传感器立即自动检测到发射出的激光束。然后将这些扫描信号直接传回到扫描仪的DSP电子产品中进行处理,将位置和方位输出数据传送给计算机主机。
特点
扫描激光束技术
不会产生金属性失真,没有漂移,噪声或声干扰。能够在高金属,高噪音的环境下很好应用,而在这种环境中磁性和惯性技术得不到很好的应用。不受环境光线影响。在固定和运动型平台上的应用也很好。
次级温度及亚毫米级精度
对现实中大部分跟踪情况来说精度高。
预报多达50毫秒
根据需要人工设置预报参数。只有预测沿着重要的轴线运动,以减少预测伴随的噪音。
测量速度240次/秒
瞬时跟踪的分辨率,没有分辨滞后。
低滞后
头部位置与图像生成保持同步。有利于缓解在虚拟环境中的运动眩晕。
应用范围
用途
默认的单元组件
::应用范围::
适用于仿真系统、实时局部放射治疗、医疗器具追踪、导引&管理机械设备、生物力学测量和回馈等诸多领域。
::技术特征::
::产品规格::
| 规格 | Ascension laserBIRD 2 tracker |
| 自由度: | 6 |
| 扫描范围: | 水平±50° 垂直±52° |
| 测量率: | 240赫兹 |
| RS-232 回复时间: | 1.0毫秒 115.2 k波特率 |
| 接口: | RS-232 USB |
| 传输: | 9.6厘米的立方体和3.05米电缆 |
| 传感器: | 25 x 25 x 20 (毫米) 重21 克 |
| 底盘: | 166 x 170 x 393(毫米) |
| 电源: | 110/220 v |
| 操作距离: | 0.15米到1.83米 |
| 传感器准确率: | 0.7毫米 RMS |
| 传感器静态分辨率: | 0.1毫米 |
| 角度范围 : | 全方位 ±180°方位角及滚动 |
| 每公尺准确率: | 0.5° RMS |
| 每公尺静态分辨率: | 0.05° |
| 扫描仪尺寸 : | 32 x 9 x 4 (厘米) |
| 扫描仪重量 : | 1.53千克 |
| 传感器尺寸 : | 10 x 9 x 1(厘米) |
| 传感器重量: | 40克 |
| 预测: | LaserBIRD 2可预测在50公尺内的位置与角度,这个特色可解决展示时图像所产生的延迟 |
| 弹性预测能力: | 一般的预测系统规则,总是多少会参杂噪讯,而laserBIRD可依使用者所设定的个别参数(X、Y、Z轴向、位置及角度)来进行预测值。经由此种做法可针对特定的轴向进行研究,提供精简且准确的数据 |
| 执行力: | 基本上使用扫描仪和传感器来测量位置和角度正确率,一般认定必须要传感器在扫描仪的激光可测量角度范围内(约水平线正负50度、垂直线正负52度之间),而传感器也需要保持在距离扫描仪43到106公分之内的距离。在传感器与发射器和扫描仪之间,也必须保持无障碍,且发射器与扫描仪的角度必须在正负85度之间 |